Adaptive Socket
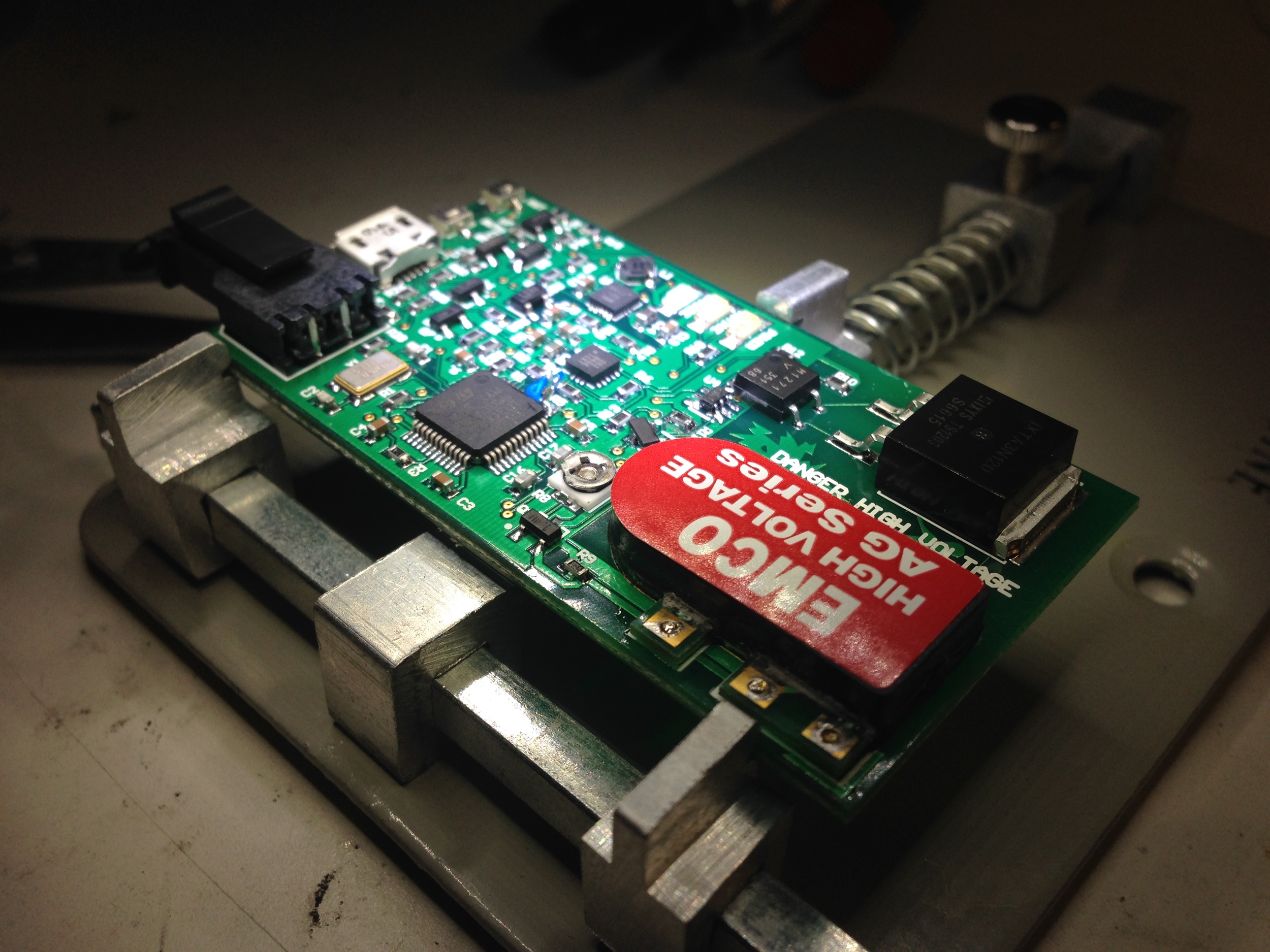
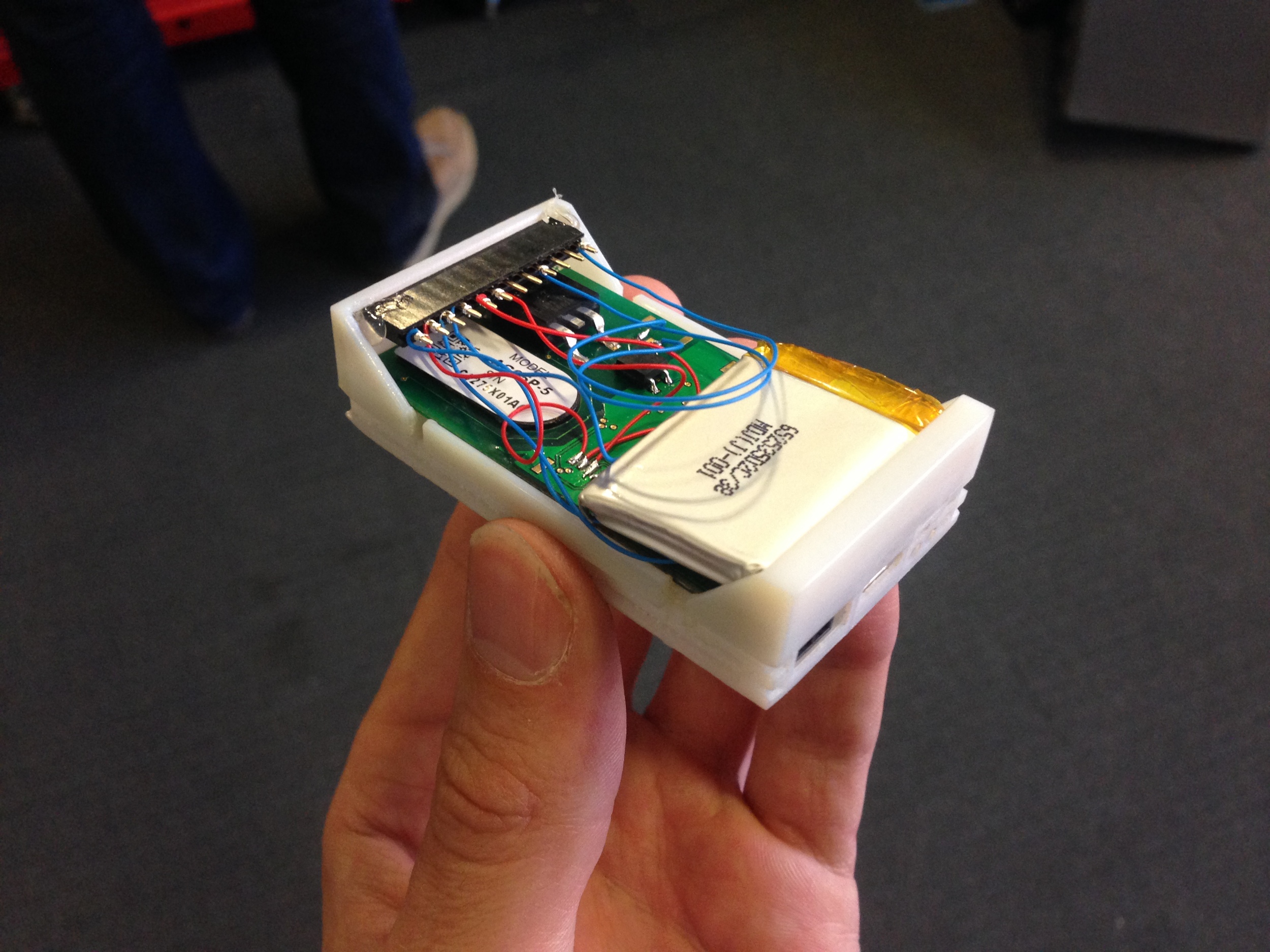
As a consultant to MIT, I worked with the Media Lab's Biomechatronics group as well as researchers from SRI International to create the electronic sensing, power, and control systems of the Adaptive Socket project.
This project combines a bespoke 3D printed prosthetic socket with a variable-stiffness material developed by SRI to create a bionic limb which can adjust its tightness around the users' residual limb in order to maximize comfort during different activities like standing still, walking, or running.
In the video to the right, this project is described starting at 7:09.
With Arthur Petron (MIT), Roy Kornbluh (SRI), and Brian McCoy (SRI)